A lire sur: http://spectrum.ieee.org/automaton/robotics/robotics-hardware/hyq-quadruped-robot-is-back-with-even-more-tricks/
By Erico Guizzo
By Erico Guizzo
Posted
Photo: IIT
HyQ, a quadruped robot created by the Italian Institute of Technology, already knew how to walk, trot, and kick. Last year, it learned how toquickly react to avoid falls when stepping on an obstacle. Now HyQ is back with even more tricks.
Claudio Semini, the IIT researcher who leads the project, tells us thatHyQ has now a "wide repertoire of motion skills that allows it to negotiate challenging and dynamically changing terrain." He says that previous research had focused on reactive behaviors, such as overcoming obstacles or recovering from stumbles. More recent work has centered on making the robot smarter and more autonomous. For example, Semini and his team are teaching HyQ how to use its cameras and perception sensors to plan and position its feet to traverse rough terrain. "Like walking over stones when you want to cross a river," he says. Another trick is walking on inclined surfaces. The researchers made HyQ traverse a V-shaped platform, pressing its feet against the sides with enough force to allow it to walk without slipping and falling.
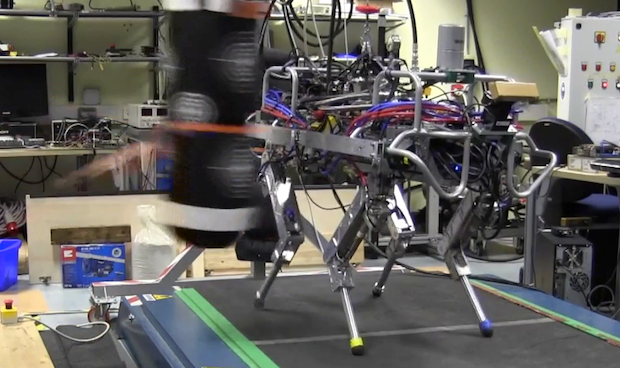
The group is also pursuing more dynamic motions such as fast trotting and reacting to disturbances, taking advantage of the robot's torque-controlled, actively compliant legs, which can adjust their stiffness and damping in real time. This capability allows the robot to absorb shocks and vibrations without damage to the body. The researchers recently demonstrated that HyQ could perform a "flying trot," a gait in which the robot is completely off the ground during a brief period of time. And in a test that seems to be a favorite among roboticists trying to show their robot can take some hard hits, the IIT researchers slammed HyQ with a 23-kilogram [50-pound] punching bag. Thanks to its active compliant system, the robot was able to absorb the impact and take fast lateral steps to avoid crashing on its face (if it had a face, that is.)
The IIT team created a video highlighting the old and new capabilities, some of which the researchers will describe in upcoming robotics conferences.
As you can see in the video, the IIT group seems quite happy with its results, calling HyQ "probably the most versatile quadruped robot." We suspect that Boston Dynamics Google would disagree, claiming that title for its own agile quadrupeds, which include BigDog, LS3, andWildCat. These robots can climb slopes, walk on icy surfaces, and evensprint in circles like a crazy animal.
That said, the HyQ project is still in its infancy compared to the decades-long legged robot research at Boston Dynamics, which dates back to the 1980s when Marc Raibert founded the Leg Laboratory at Carnegie Mellon (he would later move the lab to MIT before starting Boston Dynamics in 1992). The HyQ project also has a much smaller budget compared to the funding provided by DARPA and the U.S. military to BigDog and its siblings. And in terms of design, the Boston Dynamics machines appear to be optimized for specific tasks (e.g. WildCat is designed to run fast). HyQ, on the other hand, is a single robot that can perform a broad range of motions and whose adaptability to a given task can be tweaked by software (by making the legs more stiff or more "springy," depending on the application).
Also worth pointing out is that HyQ is a much more open project, with its creators publishing ample details about the robot's design, controllers, and operation. Boston Dynamics, as you'd expect from a private company (and a military contractor), is less forthcoming in revealing how its robots work, and now that it's owned by Google, we expect that public information will be even more scarce.
So, as we've suggested before, we think that a quadruped robot olympics would be the best way of resolving this debate. And in the mean time, we think that we have a good suggestion for the IIT team to show how capable their robot is. We hear that DARPA is working really hard to recruit more international teams to join the DARPA Robotics Challenge. We would love to see HyQ get equipped with the pair of arms we had been promised and compete with Atlas and the other 'bots. A robotic Centaur is definitely what we need in the DRC!
The HyQ project is part of IIT's Dynamic Legged Systems lab and supported by the Advanced Robotics Department at IIT, in Genoa. Collaborators include the ADRL and ASL labs of ETH Zurich and the Autonomous Motion Department of the Max-Planck Institute for Intelligent systems. This week, the robot could be seen performing a live demonstration at a museum in Rovereto, Italy, as part of the European Robotics Forum 2014.
[ HyQ Project ]
Aucun commentaire:
Enregistrer un commentaire